CoreCLR源码探索(四) GC内存收集器的内部实现 分析篇(三)
gc_heap::plan_generation_start函数的代码如下:
根据当前的generaion_allocation_pointer(alloc_ptr)计划代边界
void gc_heap::plan_generation_start (generation* gen, generation* consing_gen, uint8_t* next_plug_to_allocate)
{
// 特殊处理
// 如果某些pinned plug很大(大于demotion_plug_len_th(6MB)),把它们出队防止降代
#ifdef BIT64
// We should never demote big plugs to gen0.
if (gen == youngest_generation)
{
heap_segment* seg = ephemeral_heap_segment;
size_t mark_stack_large_bos = mark_stack_bos;
size_t large_plug_pos = 0;
while (mark_stack_large_bos < mark_stack_tos)
{
if (mark_stack_array[mark_stack_large_bos].len > demotion_plug_len_th)
{
while (mark_stack_bos <= mark_stack_large_bos)
{
size_t entry = deque_pinned_plug();
size_t len = pinned_len (pinned_plug_of (entry));
uint8_t* plug = pinned_plug (pinned_plug_of(entry));
if (len > demotion_plug_len_th)
{
dprintf (2, ("ps(%d): S %Ix (%Id)(%Ix)", gen->gen_num, plug, len, (plug+len)));
}
pinned_len (pinned_plug_of (entry)) = plug - generation_allocation_pointer (consing_gen);
assert(mark_stack_array[entry].len == 0 ||
mark_stack_array[entry].len >= Align(min_obj_size));
generation_allocation_pointer (consing_gen) = plug + len;
generation_allocation_limit (consing_gen) = heap_segment_plan_allocated (seg);
set_allocator_next_pin (consing_gen);
}
}
mark_stack_large_bos++;
}
}
#endif // BIT64
// 在当前consing_gen的generation_allocation_ptr创建一个最小的对象
// 以这个对象的开始地址作为计划代边界
// 这里的处理是保证代与代之间最少有一个对象(初始化代的时候也会这样保证)
generation_plan_allocation_start (gen) =
allocate_in_condemned_generations (consing_gen, Align (min_obj_size), -1);
// 压缩后会根据这个大小把这里的空间变为一个free object
generation_plan_allocation_start_size (gen) = Align (min_obj_size);
// 如果接下来的空间很小(小于min_obj_size),则把接下来的空间也加到上面的初始对象里
size_t allocation_left = (size_t)(generation_allocation_limit (consing_gen) - generation_allocation_pointer (consing_gen));
if (next_plug_to_allocate)
{
size_t dist_to_next_plug = (size_t)(next_plug_to_allocate - generation_allocation_pointer (consing_gen));
if (allocation_left > dist_to_next_plug)
{
allocation_left = dist_to_next_plug;
}
}
if (allocation_left < Align (min_obj_size))
{
generation_plan_allocation_start_size (gen) += allocation_left;
generation_allocation_pointer (consing_gen) += allocation_left;
}
dprintf (1, ("plan alloc gen%d(%Ix) start at %Ix (ptr: %Ix, limit: %Ix, next: %Ix)", gen->gen_num,
generation_plan_allocation_start (gen),
generation_plan_allocation_start_size (gen),
generation_allocation_pointer (consing_gen), generation_allocation_limit (consing_gen),
next_plug_to_allocate));
}
gc_heap::plan_generation_starts函数的代码如下:
这个函数会在模拟压缩所有对象后调用,用于计划剩余的代边界,如果启用了升代这里会计划gen 0的边界
void gc_heap::plan_generation_starts (generation*& consing_gen)
{
//make sure that every generation has a planned allocation start
int gen_number = settings.condemned_generation;
while (gen_number >= 0)
{
// 因为不能把gen 1和gen 0的边界放到其他segment中
// 这里需要确保consing_gen的allocation segment是ephemeral heap segment
if (gen_number < max_generation)
{
consing_gen = ensure_ephemeral_heap_segment (consing_gen);
}
// 如果这个代的边界尚未计划,则执行计划
generation* gen = generation_of (gen_number);
if (0 == generation_plan_allocation_start (gen))
{
plan_generation_start (gen, consing_gen, 0);
assert (generation_plan_allocation_start (gen));
}
gen_number--;
}
// 设置ephemeral heap segment的计划已分配大小
// now we know the planned allocation size
heap_segment_plan_allocated (ephemeral_heap_segment) =
generation_allocation_pointer (consing_gen);
}
gc_heap::generation_fragmentation函数的代码如下:
size_t gc_heap::generation_fragmentation (generation* gen,
generation* consing_gen,
uint8_t* end)
{
size_t frag;
// 判断是否所有对象都压缩到了ephemeral heap segment之前
uint8_t* alloc = generation_allocation_pointer (consing_gen);
// If the allocation pointer has reached the ephemeral segment
// fine, otherwise the whole ephemeral segment is considered
// fragmentation
if (in_range_for_segment (alloc, ephemeral_heap_segment))
{
// 原allocated - 模拟压缩的结尾allocation_pointer
if (alloc <= heap_segment_allocated(ephemeral_heap_segment))
frag = end - alloc;
else
{
// 无一个对象存活,已经把allocated设到开始地址
// case when no survivors, allocated set to beginning
frag = 0;
}
dprintf (3, ("ephemeral frag: %Id", frag));
}
else
// 所有对象都压缩到了ephemeral heap segment之前
// 添加整个范围到frag
frag = (heap_segment_allocated (ephemeral_heap_segment) -
heap_segment_mem (ephemeral_heap_segment));
heap_segment* seg = heap_segment_rw (generation_start_segment (gen));
PREFIX_ASSUME(seg != NULL);
// 添加其他segment的原allocated - 计划allcated
while (seg != ephemeral_heap_segment)
{
frag += (heap_segment_allocated (seg) -
heap_segment_plan_allocated (seg));
dprintf (3, ("seg: %Ix, frag: %Id", (size_t)seg,
(heap_segment_allocated (seg) -
heap_segment_plan_allocated (seg))));
seg = heap_segment_next_rw (seg);
assert (seg);
}
// 添加所有pinned plug前面的空余空间
dprintf (3, ("frag: %Id discounting pinned plugs", frag));
//add the length of the dequeued plug free space
size_t bos = 0;
while (bos < mark_stack_bos)
{
frag += (pinned_len (pinned_plug_of (bos)));
bos++;
}
return frag;
}
gc_heap::decide_on_compacting函数的代码如下:
BOOL gc_heap::decide_on_compacting (int condemned_gen_number,
size_t fragmentation,
BOOL& should_expand)
{
BOOL should_compact = FALSE;
should_expand = FALSE;
generation* gen = generation_of (condemned_gen_number);
dynamic_data* dd = dynamic_data_of (condemned_gen_number);
size_t gen_sizes = generation_sizes(gen);
// 碎片空间大小 / 收集代的大小(包括更年轻的代)
float fragmentation_burden = ( ((0 == fragmentation) || (0 == gen_sizes)) ? (0.0f) :
(float (fragmentation) / gen_sizes) );
dprintf (GTC_LOG, ("fragmentation: %Id (%d%%)", fragmentation, (int)(fragmentation_burden * 100.0)));
// 由Stress GC决定是否压缩
#ifdef STRESS_HEAP
// for pure GC stress runs we need compaction, for GC stress "mix"
// we need to ensure a better mix of compacting and sweeping collections
if (GCStress<cfg_any>::IsEnabled() && !settings.concurrent
&& !g_pConfig->IsGCStressMix())
should_compact = TRUE;
// 由Stress GC决定是否压缩
// 如果压缩次数不够清扫次数的十分之一则开启压缩
#ifdef GC_STATS
// in GC stress "mix" mode, for stress induced collections make sure we
// keep sweeps and compactions relatively balanced. do not (yet) force sweeps
// against the GC's determination, as it may lead to premature OOMs.
if (g_pConfig->IsGCStressMix() && settings.stress_induced)
{
int compactions = g_GCStatistics.cntCompactFGC+g_GCStatistics.cntCompactNGC;
int sweeps = g_GCStatistics.cntFGC + g_GCStatistics.cntNGC - compactions;
if (compactions < sweeps / 10)
{
should_compact = TRUE;
}
}
#endif // GC_STATS
#endif //STRESS_HEAP
// 判断是否强制压缩
if (g_pConfig->GetGCForceCompact())
should_compact = TRUE;
// 是否因为OOM(Out Of Memory)导致的GC,如果是则开启压缩
if ((condemned_gen_number == max_generation) && last_gc_before_oom)
{
should_compact = TRUE;
last_gc_before_oom = FALSE;
get_gc_data_per_heap()->set_mechanism (gc_heap_compact, compact_last_gc);
}
// gc原因中有压缩
if (settings.reason == reason_induced_compacting)
{
dprintf (2, ("induced compacting GC"));
should_compact = TRUE;
get_gc_data_per_heap()->set_mechanism (gc_heap_compact, compact_induced_compacting);
}
dprintf (2, ("Fragmentation: %d Fragmentation burden %d%%",
fragmentation, (int) (100*fragmentation_burden)));
// 如果ephemeral heap segment的空间较少则开启压缩
if (!should_compact)
{
if (dt_low_ephemeral_space_p (tuning_deciding_compaction))
{
dprintf(GTC_LOG, ("compacting due to low ephemeral"));
should_compact = TRUE;
get_gc_data_per_heap()->set_mechanism (gc_heap_compact, compact_low_ephemeral);
}
}
// 如果ephemeral heap segment的空间较少,并且当前不是Full GC还需要使用新的ephemeral heap segment
if (should_compact)
{
if ((condemned_gen_number >= (max_generation - 1)))
{
if (dt_low_ephemeral_space_p (tuning_deciding_expansion))
{
dprintf (GTC_LOG,("Not enough space for all ephemeral generations with compaction"));
should_expand = TRUE;
}
}
}
#ifdef BIT64
BOOL high_memory = FALSE;
#endif // BIT64
// 根据碎片空间大小判断
if (!should_compact)
{
// We are not putting this in dt_high_frag_p because it's not exactly
// high fragmentation - it's just enough planned fragmentation for us to
// want to compact. Also the "fragmentation" we are talking about here
// is different from anywhere else.
// 碎片空间大小 >= dd_fragmentation_limit 或者
// 碎片空间大小 / 收集代的大小(包括更年轻的代) >= dd_fragmentation_burden_limit 时开启压缩
// 作者机器上的dd_fragmentation_limit是200000, dd_fragmentation_burden_limit是0.25
BOOL frag_exceeded = ((fragmentation >= dd_fragmentation_limit (dd)) &&
(fragmentation_burden >= dd_fragmentation_burden_limit (dd)));
if (frag_exceeded)
{
#ifdef BACKGROUND_GC
// do not force compaction if this was a stress-induced GC
IN_STRESS_HEAP(if (!settings.stress_induced))
{
#endif // BACKGROUND_GC
assert (settings.concurrent == FALSE);
should_compact = TRUE;
get_gc_data_per_heap()->set_mechanism (gc_heap_compact, compact_high_frag);
#ifdef BACKGROUND_GC
}
#endif // BACKGROUND_GC
}
// 如果占用内存过高则启用压缩
#ifdef BIT64
// check for high memory situation
if(!should_compact)
{
uint32_t num_heaps = 1;
#ifdef MULTIPLE_HEAPS
num_heaps = gc_heap::n_heaps;
#endif // MULTIPLE_HEAPS
ptrdiff_t reclaim_space = generation_size(max_generation) - generation_plan_size(max_generation);
if((settings.entry_memory_load >= high_memory_load_th) && (settings.entry_memory_load < v_high_memory_load_th))
{
if(reclaim_space > (int64_t)(min_high_fragmentation_threshold (entry_available_physical_mem, num_heaps)))
{
dprintf(GTC_LOG,("compacting due to fragmentation in high memory"));
should_compact = TRUE;
get_gc_data_per_heap()->set_mechanism (gc_heap_compact, compact_high_mem_frag);
}
high_memory = TRUE;
}
else if(settings.entry_memory_load >= v_high_memory_load_th)
{
if(reclaim_space > (ptrdiff_t)(min_reclaim_fragmentation_threshold (num_heaps)))
{
dprintf(GTC_LOG,("compacting due to fragmentation in very high memory"));
should_compact = TRUE;
get_gc_data_per_heap()->set_mechanism (gc_heap_compact, compact_vhigh_mem_frag);
}
high_memory = TRUE;
}
}
#endif // BIT64
}
// 测试是否可以在ephemeral_heap_segment.allocated后面提交一段内存(从系统获取一块物理内存)
// 如果失败则启用压缩
allocated (ephemeral_heap_segment);
size_t size = Align (min_obj_size)*(condemned_gen_number+1);
// The purpose of calling ensure_gap_allocation here is to make sure
// that we actually are able to commit the memory to allocate generation
// starts.
if ((should_compact == FALSE) &&
(ensure_gap_allocation (condemned_gen_number) == FALSE))
{
should_compact = TRUE;
get_gc_data_per_heap()->set_mechanism (gc_heap_compact, compact_no_gaps);
}
// 如果这次Full GC的效果比较差
// 需要减少Full GC的频率,should_lock_elevation可以把Full GC变为gen 1 GC
if (settings.condemned_generation == max_generation)
{
//check the progress
if (
#ifdef BIT64
(high_memory && !should_compact) ||
#endif // BIT64
(generation_plan_allocation_start (generation_of (max_generation - 1)) >=
generation_allocation_start (generation_of (max_generation - 1))))
{
dprintf (2, (" Elevation: gen2 size: %d, gen2 plan size: %d, no progress, elevation = locked",
generation_size (max_generation),
generation_plan_size (max_generation)));
//no progress -> lock
settings.should_lock_elevation = TRUE;
}
}
// 如果启用了NoGCRegion但是仍然启用了GC代表这是无法从SOH(Small Object Heap)或者LOH分配到内存导致的,需要启用压缩
if (settings.pause_mode == pause_no_gc)
{
should_compact = TRUE;
// 如果ephemeral heap segement压缩后的剩余空间不足还需要设置新的ephemeral heap segment
if ((size_t)(heap_segment_reserved (ephemeral_heap_segment) - heap_segment_plan_allocated (ephemeral_heap_segment))
< soh_allocation_no_gc)
{
should_expand = TRUE;
}
}
dprintf (2, ("will %s", (should_compact ? "compact" : "sweep")));
return should_compact;
}
计划阶段在模拟压缩和判断后会在内部包含重定位阶段(relocate_phase),压缩阶段(compact_phase)和清扫阶段(sweep_phase)的处理,
接下来我们仔细分析一下这三个阶段做了什么事情:
重定位阶段(relocate_phase)
重定位阶段的主要工作是修改对象的指针地址,例如A.Member的Member内存移动后,A中指向Member的指针地址也需要改变。
重定位阶段只会修改指针地址,复制内存会交给下面的压缩阶段(compact_phase)完成。
如下图:
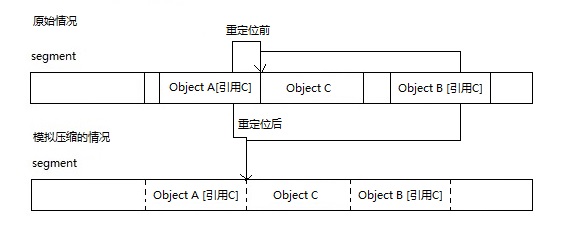
图中对象A和对象B引用了对象C,重定位后各个对象还在原来的位置,只是成员的地址(指针)变化了。
还记得之前标记阶段(mark_phase)使用的GcScanRoots等扫描函数吗?
这些扫描函数同样会在重定位阶段使用,只是执行的不是GCHeap::Promote而是GCHeap::Relocate。
重定位对象会借助计划阶段(plan_phase)构建的brick table和plug树来进行快速的定位,然后对指针地址移动所属plug的reloc位置。
重定位阶段(relocate_phase)的代码
gc_heap::relocate_phase函数的代码如下:
void gc_heap::relocate_phase (int condemned_gen_number,
uint8_t* first_condemned_address)
{
// 生成扫描上下文
ScanContext sc;
sc.thread_number = heap_number;
sc.promotion = FALSE;
sc.concurrent = FALSE;
// 统计重定位阶段的开始时间
#ifdef TIME_GC
unsigned start;
unsigned finish;
start = GetCycleCount32();
#endif //TIME_GC
// %type% category = quote (relocate);
dprintf (2,("---- Relocate phase -----"));
#ifdef MULTIPLE_HEAPS
//join all threads to make sure they are synchronized
dprintf(3, ("Joining after end of plan"));
gc_t_join.join(this, gc_join_begin_relocate_phase);
if (gc_t_join.joined())
#endif //MULTIPLE_HEAPS
{
#ifdef MULTIPLE_HEAPS
//join all threads to make sure they are synchronized
dprintf(3, ("Restarting for relocation"));
gc_t_join.restart();
#endif //MULTIPLE_HEAPS
}
// 扫描根对象(各个线程中栈和寄存器中的对象)
// 对扫描到的各个对象调用`GCHeap::Relocate`函数
// 注意`GCHeap::Relocate`函数不会重定位子对象,这里只是用来重定位来源于根对象的引用
dprintf(3,("Relocating roots"));
GCScan::GcScanRoots(GCHeap::Relocate,
condemned_gen_number, max_generation, &sc);
verify_pins_with_post_plug_info("after reloc stack");
#ifdef BACKGROUND_GC
if (recursive_gc_sync::background_running_p())
{
scan_background_roots (GCHeap::Relocate, heap_number, &sc);
}
#endif //BACKGROUND_GC
// 非Full GC时,遍历Card Table重定位小对象
// 同上,`gc_heap::relocate_address`函数不会重定位子对象,这里只是用来重定位来源于旧代的引用
if (condemned_gen_number != max_generation)
{
dprintf(3,("Relocating cross generation pointers"));
mark_through_cards_for_segments (&gc_heap::relocate_address, TRUE);
verify_pins_with_post_plug_info("after reloc cards");
}
// 非Full GC时,遍历Card Table重定位大对象
// 同上,`gc_heap::relocate_address`函数不会重定位子对象,这里只是用来重定位来源于旧代的引用
if (condemned_gen_number != max_generation)
{
dprintf(3,("Relocating cross generation pointers for large objects"));
mark_through_cards_for_large_objects (&gc_heap::relocate_address, TRUE);
}
else
{
// Full GC时,如果启用了大对象压缩则压缩大对象的堆
#ifdef FEATURE_LOH_COMPACTION
if (loh_compacted_p)
{
assert (settings.condemned_generation == max_generation);
relocate_in_loh_compact();
}
else
#endif //FEATURE_LOH_COMPACTION
{
relocate_in_large_objects ();
}
}
// 重定位存活下来的对象中的引用(收集代中的对象)
// 枚举brick table对各个plug中的对象调用`relocate_obj_helper`重定位它们的成员
{
dprintf(3,("Relocating survivors"));
relocate_survivors (condemned_gen_number,
first_condemned_address);
}
// 扫描在析构队列中的对象
#ifdef FEATURE_PREMORTEM_FINALIZATION
dprintf(3,("Relocating finalization data"));
finalize_queue->RelocateFinalizationData (condemned_gen_number,
__this);
#endif // FEATURE_PREMORTEM_FINALIZATION
// 扫描在GC Handle表中的对象
// MTHTS
{
dprintf(3,("Relocating handle table"));
GCScan::GcScanHandles(GCHeap::Relocate,
condemned_gen_number, max_generation, &sc);
}
#ifdef MULTIPLE_HEAPS
//join all threads to make sure they are synchronized
dprintf(3, ("Joining after end of relocation"));
gc_t_join.join(this, gc_join_relocate_phase_done);
#endif //MULTIPLE_HEAPS
// 统计重定位阶段的结束时间
#ifdef TIME_GC
finish = GetCycleCount32();
reloc_time = finish - start;
#endif //TIME_GC
dprintf(2,( "---- End of Relocate phase ----"));
}
GCHeap::Relocate函数的代码如下:
// ppObject是保存对象地址的地址,例如&A.Member
void GCHeap::Relocate (Object** ppObject, ScanContext* sc,
uint32_t flags)
{
UNREFERENCED_PARAMETER(sc);
// 对象的地址
uint8_t* object = (uint8_t*)(Object*)(*ppObject);
THREAD_NUMBER_FROM_CONTEXT;
//dprintf (3, ("Relocate location %Ix\n", (size_t)ppObject));
dprintf (3, ("R: %Ix", (size_t)ppObject));
// 空指针不处理
if (object == 0)
return;
// 获取对象所属的gc_heap
gc_heap* hp = gc_heap::heap_of (object);
// 验证对象是否合法,除错用
// 如果object不一定是对象的开始地址,则不做验证
#ifdef _DEBUG
if (!(flags & GC_CALL_INTERIOR))
{
// We cannot validate this object if it's in the condemned gen because it could
// be one of the objects that were overwritten by an artificial gap due to a pinned plug.
if (!((object >= hp->gc_low) && (object < hp->gc_high)))
{
((CObjectHeader*)object)->Validate(FALSE);
}
}
#endif //_DEBUG
dprintf (3, ("Relocate %Ix\n", (size_t)object));
uint8_t* pheader;
// 如果object不一定是对象的开始地址,找到对象的开始地址并重定位该开始地址,然后修改ppObject
// 例如object是0x10000008,对象的开始地址是0x10000000,重定位后是0x0fff0000则*ppObject会设为0x0fff0008
if ((flags & GC_CALL_INTERIOR) && gc_heap::settings.loh_compaction)
{
if (!((object >= hp->gc_low) && (object < hp->gc_high)))
{
return;
}
if (gc_heap::loh_object_p (object))
{
pheader = hp->find_object (object, 0);
if (pheader == 0)
{
return;
}
ptrdiff_t ref_offset = object - pheader;
hp->relocate_address(&pheader THREAD_NUMBER_ARG);
*ppObject = (Object*)(pheader + ref_offset);
return;
}
}
// 如果object是对象的开始地址则重定位object
{
pheader = object;
hp->relocate_address(&pheader THREAD_NUMBER_ARG);
*ppObject = (Object*)pheader;
}
STRESS_LOG_ROOT_RELOCATE(ppObject, object, pheader, ((!(flags & GC_CALL_INTERIOR)) ? ((Object*)object)->GetGCSafeMethodTable() : 0));
}
gc_heap::relocate_address函数的代码如下:
void gc_heap::relocate_address (uint8_t** pold_address THREAD_NUMBER_DCL)
{
// 不在本次gc回收范围内的对象指针不需要移动
uint8_t* old_address = *pold_address;
if (!((old_address >= gc_low) && (old_address < gc_high)))
#ifdef MULTIPLE_HEAPS
{
UNREFERENCED_PARAMETER(thread);
if (old_address == 0)
return;
gc_heap* hp = heap_of (old_address);
if ((hp == this) ||
!((old_address >= hp->gc_low) && (old_address < hp->gc_high)))
return;
}
#else //MULTIPLE_HEAPS
return ;
#endif //MULTIPLE_HEAPS
// 根据对象找到对应的brick
// delta translates old_address into address_gc (old_address);
size_t brick = brick_of (old_address);
int brick_entry = brick_table [ brick ];
uint8_t* new_address = old_address;
if (! ((brick_entry == 0)))
{
retry:
{
// 如果是负数则向前继续找
while (brick_entry < 0)
{
brick = (brick + brick_entry);
brick_entry = brick_table [ brick ];
}
uint8_t* old_loc = old_address;
// 根据plug树搜索对象所在的plug
uint8_t* node = tree_search ((brick_address (brick) + brick_entry-1),
old_loc);
// 找到时确定新的地址,找不到时继续找前面的brick(有可能在上一个brick中)
if ((node <= old_loc))
new_address = (old_address + node_relocation_distance (node));
else
{
if (node_left_p (node))
{
dprintf(3,(" L: %Ix", (size_t)node));
new_address = (old_address +
(node_relocation_distance (node) +
node_gap_size (node)));
}
else
{
brick = brick - 1;
brick_entry = brick_table [ brick ];
goto retry;
}
}
}
// 修改对象指针的地址
*pold_address = new_address;
return;
}
// 如果对象是大对象,对象本身就是一个plug所以可以直接取到reloc
#ifdef FEATURE_LOH_COMPACTION
if (loh_compacted_p
#ifdef FEATURE_BASICFREEZE
&& !frozen_object_p((Object*)old_address)
#endif // FEATURE_BASICFREEZE
)
{
*pold_address = old_address + loh_node_relocation_distance (old_address);
}
else
#endif //FEATURE_LOH_COMPACTION
{
*pold_address = new_address;
}
}
gc_heap::relocate_survivors函数的代码如下:
这个函数用于重定位存活下来的对象中的引用
void gc_heap::relocate_survivors (int condemned_gen_number,
uint8_t* first_condemned_address)
{
generation* condemned_gen = generation_of (condemned_gen_number);
uint8_t* start_address = first_condemned_address;
size_t current_brick = brick_of (start_address);
heap_segment* current_heap_segment = heap_segment_rw (generation_start_segment (condemned_gen));
PREFIX_ASSUME(current_heap_segment != NULL);
uint8_t* end_address = 0;
// 重设mark_stack_array队列
reset_pinned_queue_bos();
// 更新gc_heap中的oldest_pinned_plug对象
update_oldest_pinned_plug();
end_address = heap_segment_allocated (current_heap_segment);
size_t end_brick = brick_of (end_address - 1);
// 初始化重定位参数
relocate_args args;
// 本次gc的回收范围
args.low = gc_low;
args.high = gc_high;
// 当前的plug结尾是否被下一个plug覆盖了
args.is_shortened = FALSE
// last_plug或者last_plug后面的pinned plug
// 处理plug尾部数据覆盖时需要用到它
args.pinned_plug_entry = 0;
// 上一个plug,用于遍历树时可以从小地址到大地址遍历(中序遍历)
args.last_plug = 0;
while (1)
{
// 当前segment已经处理完
if (current_brick > end_brick)
{
// 处理最后一个plug,结尾地址是heap_segment_allocated
if (args.last_plug)
{
{
assert (!(args.is_shortened));
relocate_survivors_in_plug (args.last_plug,
heap_segment_allocated (current_heap_segment),
args.is_shortened,
args.pinned_plug_entry);
}
args.last_plug = 0;
}
// 如果有下一个segment则处理下一个
if (heap_segment_next_rw (current_heap_segment))
{
current_heap_segment = heap_segment_next_rw (current_heap_segment);
current_brick = brick_of (heap_segment_mem (current_heap_segment));
end_brick = brick_of (heap_segment_allocated (current_heap_segment)-1);
continue;
}
else
{
break;
}
}
{
// 如果当前brick有对应的plug树,处理当前brick
int brick_entry = brick_table [ current_brick ];
if (brick_entry >= 0)
{
relocate_survivors_in_brick (brick_address (current_brick) +
brick_entry -1,
&args);
}
}
current_brick++;
}
}
gc_heap::relocate_survivors_in_brick函数的代码如下:
void gc_heap::relocate_survivors_in_brick (uint8_t* tree, relocate_args* args)
{
// 遍历plug树
// 会从小到大调用relocate_survivors_in_plug (中序遍历, 借助args->last_plug)
// 例如有这样的plug树
// a
// b c
// d e
// 枚举顺序是a b d e c
// 调用relocate_survivors_in_plug的顺序是d b e a c
assert ((tree != NULL));
dprintf (3, ("tree: %Ix, args->last_plug: %Ix, left: %Ix, right: %Ix, gap(t): %Ix",
tree, args->last_plug,
(tree + node_left_child (tree)),
(tree + node_right_child (tree)),
node_gap_size (tree)));
// 处理左节点
if (node_left_child (tree))
{
relocate_survivors_in_brick (tree + node_left_child (tree), args);
}
// 处理last_plug
{
uint8_t* plug = tree;
BOOL has_post_plug_info_p = FALSE;
BOOL has_pre_plug_info_p = FALSE;
// 如果这个plug是pinned plug
// 获取是否有has_pre_plug_info_p (是否覆盖了last_plug的尾部)
// 获取是否有has_post_plug_info_p (是否被下一个plug覆盖了尾部)
if (tree == oldest_pinned_plug)
{
args->pinned_plug_entry = get_oldest_pinned_entry (&has_pre_plug_info_p,
&has_post_plug_info_p);
assert (tree == pinned_plug (args->pinned_plug_entry));
dprintf (3, ("tree is the oldest pin: %Ix", tree));
}
// 处理last_plug
if (args->last_plug)
{
size_t gap_size = node_gap_size (tree);
// last_plug的结尾 = 当前plug的开始地址 - gap
uint8_t* gap = (plug - gap_size);
dprintf (3, ("tree: %Ix, gap: %Ix (%Ix)", tree, gap, gap_size));
assert (gap_size >= Align (min_obj_size));
uint8_t* last_plug_end = gap;
// last_plug的尾部是否被覆盖了
// args->is_shortened代表last_plug是pinned_plug,被下一个unpinned plug覆盖了尾部
// has_pre_plug_info_p代表last_plug是unpinned plug,被下一个pinned plug覆盖了尾部
BOOL check_last_object_p = (args->is_shortened || has_pre_plug_info_p);
// 处理last_plug,结尾地址是当前plug的开始地址 - gap
{
relocate_survivors_in_plug (args->last_plug, last_plug_end, check_last_object_p, args->pinned_plug_entry);
}
}
else
{
assert (!has_pre_plug_info_p);
}
// 设置last_plug
args->last_plug = plug;
// 设置是否被覆盖了尾部
args->is_shortened = has_post_plug_info_p;
if (has_post_plug_info_p)
{
dprintf (3, ("setting %Ix as shortened", plug));
}
dprintf (3, ("last_plug: %Ix(shortened: %d)", plug, (args->is_shortened ? 1 : 0)));
}
// 处理右节点
if (node_right_child (tree))
{
relocate_survivors_in_brick (tree + node_right_child (tree), args);
}
}
gc_heap::relocate_survivors_in_plug函数的代码如下:
void gc_heap::relocate_survivors_in_plug (uint8_t* plug, uint8_t* plug_end,
BOOL check_last_object_p,
mark* pinned_plug_entry)
{
//dprintf(3,("Relocating pointers in Plug [%Ix,%Ix[", (size_t)plug, (size_t)plug_end));
dprintf (3,("RP: [%Ix,%Ix[", (size_t)plug, (size_t)plug_end));
// plug的结尾被覆盖过,需要特殊的处理
if (check_last_object_p)
{
relocate_shortened_survivor_helper (plug, plug_end, pinned_plug_entry);
}
// 一般的处理
else
{
relocate_survivor_helper (plug, plug_end);
}
}
gc_heap::relocate_survivor_helper函数的代码如下:
void gc_heap::relocate_survivor_helper (uint8_t* plug, uint8_t* plug_end)
{
// 枚举plug中的对象,分别调用relocate_obj_helper函数
uint8_t* x = plug;
while (x < plug_end)
{
size_t s = size (x);
uint8_t* next_obj = x + Align (s);
Prefetch (next_obj);
relocate_obj_helper (x, s);
assert (s > 0);
x = next_obj;
}
}
gc_heap::relocate_obj_helper函数的代码如下:
inline void
gc_heap::relocate_obj_helper (uint8_t* x, size_t s)
{
THREAD_FROM_HEAP;
// 判断对象中是否包含了引用
if (contain_pointers (x))
{
dprintf (3, ("$%Ix$", (size_t)x));
// 重定位这个对象的所有成员
// 注意这里不会包含对象自身(nostart)
go_through_object_nostart (method_table(x), x, s, pval,
{
uint8_t* child = *pval;
reloc_survivor_helper (pval);
if (child)
{
dprintf (3, ("%Ix->%Ix->%Ix", (uint8_t*)pval, child, *pval));
}
});
}
check_class_object_demotion (x);
}
gc_heap::reloc_survivor_helper函数的代码如下:
inline void
gc_heap::reloc_survivor_helper (uint8_t** pval)
{
// 执行重定位,relocate_address函数上面有解释
THREAD_FROM_HEAP;
relocate_address (pval THREAD_NUMBER_ARG);
// 如果对象在降代范围中,需要设置来源位置在Card Table中的标记
check_demotion_helper (pval, (uint8_t*)pval);
}
gc_heap::relocate_shortened_survivor_helper函数的代码如下:
void gc_heap::relocate_shortened_survivor_helper (uint8_t* plug, uint8_t* plug_end, mark* pinned_plug_entry)
{
uint8_t* x = plug;
// 如果p_plug == plug表示当前plug是pinned plug,结尾被下一个plug覆盖
// 如果p_plug != plug表示当前plug是unpinned plug,结尾被p_plug覆盖
uint8_t* p_plug = pinned_plug (pinned_plug_entry);
BOOL is_pinned = (plug == p_plug);
BOOL check_short_obj_p = (is_pinned ? pinned_plug_entry->post_short_p() : pinned_plug_entry->pre_short_p());
// 因为这个plug的结尾被覆盖了,下一个plug的gap是特殊gap,这里要加回去大小
plug_end += sizeof (gap_reloc_pair);
//dprintf (3, ("%s %Ix is shortened, and last object %s overwritten", (is_pinned ? "PP" : "NP"), plug, (check_short_obj_p ? "is" : "is not")));
dprintf (3, ("%s %Ix-%Ix short, LO: %s OW", (is_pinned ? "PP" : "NP"), plug, plug_end, (check_short_obj_p ? "is" : "is not")));
verify_pins_with_post_plug_info("begin reloc short surv");
// 枚举plug中的对象
while (x < plug_end)
{
// plug的最后一个对象被完全覆盖了,需要做特殊处理
if (check_short_obj_p && ((plug_end - x) < min_pre_pin_obj_size))
{
dprintf (3, ("last obj %Ix is short", x));
// 当前plug是pinned plug,结尾被下一个unpinned plug覆盖了
// 根据最后一个对象的成员bitmap重定位
if (is_pinned)
{
#ifdef COLLECTIBLE_CLASS
if (pinned_plug_entry->post_short_collectible_p())
unconditional_set_card_collectible (x);
#endif //COLLECTIBLE_CLASS
// Relocate the saved references based on bits set.
// 成员应该存在的地址(被覆盖的数据中),设置Card Table会使用这个地址
uint8_t** saved_plug_info_start = (uint8_t**)(pinned_plug_entry->get_post_plug_info_start());
// 成员真实存在的地址(备份数据中)
uint8_t** saved_info_to_relocate = (uint8_t**)(pinned_plug_entry->get_post_plug_reloc_info());
// 枚举成员的bitmap
for (size_t i = 0; i < pinned_plug_entry->get_max_short_bits(); i++)
{
// 如果成员存在则重定位该成员
if (pinned_plug_entry->post_short_bit_p (i))
{
reloc_ref_in_shortened_obj ((saved_plug_info_start + i), (saved_info_to_relocate + i));
}
}
}
// 当前plug是unpinned plug,结尾被下一个pinned plug覆盖了
// 处理和上面一样
else
{
#ifdef COLLECTIBLE_CLASS
if (pinned_plug_entry->pre_short_collectible_p())
unconditional_set_card_collectible (x);
#endif //COLLECTIBLE_CLASS
relocate_pre_plug_info (pinned_plug_entry);
// Relocate the saved references based on bits set.
uint8_t** saved_plug_info_start = (uint8_t**)(p_plug - sizeof (plug_and_gap));
uint8_t** saved_info_to_relocate = (uint8_t**)(pinned_plug_entry->get_pre_plug_reloc_info());
for (size_t i = 0; i < pinned_plug_entry->get_max_short_bits(); i++)
{
if (pinned_plug_entry->pre_short_bit_p (i))
{
reloc_ref_in_shortened_obj ((saved_plug_info_start + i), (saved_info_to_relocate + i));
}
}
}
// 处理完最后一个对象,可以跳出了
break;
}
size_t s = size (x);
uint8_t* next_obj = x + Align (s);
Prefetch (next_obj);
// 最后一个对象被覆盖了,但是只是覆盖了后半部分,不是全部被覆盖
if (next_obj >= plug_end)
{
dprintf (3, ("object %Ix is at the end of the plug %Ix->%Ix",
next_obj, plug, plug_end));
verify_pins_with_post_plug_info("before reloc short obj");
relocate_shortened_obj_helper (x, s, (x + Align (s) - sizeof (plug_and_gap)), pinned_plug_entry, is_pinned);
}
// 对象未被覆盖,调用一般的处理
else
{
relocate_obj_helper (x, s);
}
assert (s > 0);
x = next_obj;
}
verify_pins_with_post_plug_info("end reloc short surv");
}
gc_heap::reloc_ref_in_shortened_obj函数的代码如下:
inline
void gc_heap::reloc_ref_in_shortened_obj (uint8_t** address_to_set_card, uint8_t** address_to_reloc)
{
THREAD_FROM_HEAP;
// 重定位对象
// 这里的address_to_reloc会在备份数据中
uint8_t* old_val = (address_to_reloc ? *address_to_reloc : 0);
relocate_address (address_to_reloc THREAD_NUMBER_ARG);
if (address_to_reloc)
{
dprintf (3, ("SR %Ix: %Ix->%Ix", (uint8_t*)address_to_reloc, old_val, *address_to_reloc));
}
// 如果对象在降代范围中,设置Card Table
// 这里的address_to_set_card会在被覆盖的数据中
//check_demotion_helper (current_saved_info_to_relocate, (uint8_t*)pval);
uint8_t* relocated_addr = *address_to_reloc;
if ((relocated_addr < demotion_high) &&
(relocated_addr >= demotion_low))
{
dprintf (3, ("set card for location %Ix(%Ix)",
(size_t)address_to_set_card, card_of((uint8_t*)address_to_set_card)));
set_card (card_of ((uint8_t*)address_to_set_card));
}
#ifdef MULTIPLE_HEAPS
// 不在当前heap时试着找到对象所在的heap并且用该heap处理
else if (settings.demotion)
{
gc_heap* hp = heap_of (relocated_addr);
if ((relocated_addr < hp->demotion_high) &&
(relocated_addr >= hp->demotion_low))
{
dprintf (3, ("%Ix on h%d, set card for location %Ix(%Ix)",
relocated_addr, hp->heap_number, (size_t)address_to_set_card, card_of((uint8_t*)address_to_set_card)));
set_card (card_of ((uint8_t*)address_to_set_card));
}
}
#endif //MULTIPLE_HEAPS
}
gc_heap::relocate_shortened_obj_helper函数的代码如下:
inline
void gc_heap::relocate_shortened_obj_helper (uint8_t* x, size_t s, uint8_t* end, mark* pinned_plug_entry, BOOL is_pinned)
{
THREAD_FROM_HEAP;
uint8_t* plug = pinned_plug (pinned_plug_entry);
// 如果当前plug是unpinned plug, 代表邻接的pinned plug中保存的pre_plug_info_reloc_start可能已经被移动了
// 这里需要重定位pinned plug中保存的pre_plug_info_reloc_start (unpinned plug被覆盖的内容的开始地址)
if (!is_pinned)
{
//// Temporary - we just wanna make sure we are doing things right when padding is needed.
//if ((x + s) < plug)
//{
// dprintf (3, ("obj %Ix needed padding: end %Ix is %d bytes from pinned obj %Ix",
// x, (x + s), (plug- (x + s)), plug));
// GCToOSInterface::DebugBreak();
//}
relocate_pre_plug_info (pinned_plug_entry);
}
verify_pins_with_post_plug_info("after relocate_pre_plug_info");
uint8_t* saved_plug_info_start = 0;
uint8_t** saved_info_to_relocate = 0;
// saved_plug_info_start等于被覆盖的地址的开始
// saved_info_to_relocate等于原始内容的开始
if (is_pinned)
{
saved_plug_info_start = (uint8_t*)(pinned_plug_entry->get_post_plug_info_start());
saved_info_to_relocate = (uint8_t**)(pinned_plug_entry->get_post_plug_reloc_info());
}
else
{
saved_plug_info_start = (plug - sizeof (plug_and_gap));
saved_info_to_relocate = (uint8_t**)(pinned_plug_entry->get_pre_plug_reloc_info());
}
uint8_t** current_saved_info_to_relocate = 0;
uint8_t* child = 0;
dprintf (3, ("x: %Ix, pp: %Ix, end: %Ix", x, plug, end));
// 判断对象中是否包含了引用
if (contain_pointers (x))
{
dprintf (3,("$%Ix$", (size_t)x));
// 重定位这个对象的所有成员
// 注意这里不会包含对象自身(nostart)
go_through_object_nostart (method_table(x), x, s, pval,
{
dprintf (3, ("obj %Ix, member: %Ix->%Ix", x, (uint8_t*)pval, *pval));
// 成员所在的部分被覆盖了,调用reloc_ref_in_shortened_obj重定位
// pval = 成员应该存在的地址(被覆盖的数据中),设置Card Table会使用这个地址
// current_saved_info_to_relocate = 成员真实存在的地址(备份数据中)
if ((uint8_t*)pval >= end)
{
current_saved_info_to_relocate = saved_info_to_relocate + ((uint8_t*)pval - saved_plug_info_start) / sizeof (uint8_t**);
child = *current_saved_info_to_relocate;
reloc_ref_in_shortened_obj (pval, current_saved_info_to_relocate);
dprintf (3, ("last part: R-%Ix(saved: %Ix)->%Ix ->%Ix",
(uint8_t*)pval, current_saved_info_to_relocate, child, *current_saved_info_to_relocate));
}
// 成员所在的部分未被覆盖,调用一般的处理
else
{
reloc_survivor_helper (pval);
}
});
}
check_class_object_demotion (x);
}
重定位阶段(relocate_phase)只是修改了引用对象的地址,对象还在原来的位置,接下来进入压缩阶段(compact_phase):
压缩阶段(compact_phase)
压缩阶段负责把对象复制到之前模拟压缩到的地址上,简单点来讲就是用memcpy复制这些对象到新的地址。
压缩阶段会使用之前构建的brick table和plug树快速的枚举对象。
gc_heap::compact_phase函数的代码如下:
这个函数的代码是不是有点眼熟?它的流程和上面的relocate_survivors很像,都是枚举brick table然后中序枚举plug树
void gc_heap::compact_phase (int condemned_gen_number,
uint8_t* first_condemned_address,
BOOL clear_cards)
{
// %type% category = quote (compact);
// 统计压缩阶段的开始时间
#ifdef TIME_GC
unsigned start;
unsigned finish;
start = GetCycleCount32();
#endif //TIME_GC
generation* condemned_gen = generation_of (condemned_gen_number);
uint8_t* start_address = first_condemned_address;
size_t current_brick = brick_of (start_address);
heap_segment* current_heap_segment = heap_segment_rw (generation_start_segment (condemned_gen));
PREFIX_ASSUME(current_heap_segment != NULL);
// 重设mark_stack_array队列
reset_pinned_queue_bos();
// 更新gc_heap中的oldest_pinned_plug对象
update_oldest_pinned_plug();
// 如果should_expand的时候重用了以前的segment作为ephemeral heap segment,则需要重新计算generation_allocation_size
// reused_seg会影响压缩参数中的check_gennum_p
BOOL reused_seg = expand_reused_seg_p();
if (reused_seg)
{
for (int i = 1; i <= max_generation; i++)
{
generation_allocation_size (generation_of (i)) = 0;
}
}
uint8_t* end_address = heap_segment_allocated (current_heap_segment);
size_t end_brick = brick_of (end_address-1);
// 初始化压缩参数
compact_args args;
// 上一个plug,用于遍历树时可以从小地址到大地址遍历(中序遍历)
args.last_plug = 0;
// 当前brick的最后一个plug,更新brick table时使用
args.before_last_plug = 0;
// 最后设置的brick,用于复制plug后更新brick table
args.current_compacted_brick = ~((size_t)1);
// 当前的plug结尾是否被下一个plug覆盖了
args.is_shortened = FALSE;
// last_plug或者last_plug后面的pinned plug
// 处理plug尾部数据覆盖时需要用到它
args.pinned_plug_entry = 0;
// 是否需要在复制对象时复制相应的Card Table范围
args.copy_cards_p = (condemned_gen_number >= 1) || !clear_cards;
// 重新计算generation_allocation_size时使用的参数
args.check_gennum_p = reused_seg;
if (args.check_gennum_p)
{
args.src_gennum = ((current_heap_segment == ephemeral_heap_segment) ? -1 : 2);
}
dprintf (2,("---- Compact Phase: %Ix(%Ix)----",
first_condemned_address, brick_of (first_condemned_address)));
#ifdef MULTIPLE_HEAPS
//restart
if (gc_t_join.joined())
{
#endif //MULTIPLE_HEAPS
#ifdef MULTIPLE_HEAPS
dprintf(3, ("Restarting for compaction"));
gc_t_join.restart();
}
#endif //MULTIPLE_HEAPS
// 再次重设mark_stack_array队列
reset_pinned_queue_bos();
// 判断是否需要压缩大对象的堆
#ifdef FEATURE_LOH_COMPACTION
if (loh_compacted_p)
{
compact_loh();
}
#endif //FEATURE_LOH_COMPACTION
// 循环brick table
if ((start_address < end_address) ||
(condemned_gen_number == max_generation))
{
while (1)
{
// 当前segment已经处理完
if (current_brick > end_brick)
{
// 处理最后一个plug,大小是heap_segment_allocated - last_plug
if (args.last_plug != 0)
{
dprintf (3, ("compacting last plug: %Ix", args.last_plug))
compact_plug (args.last_plug,
(heap_segment_allocated (current_heap_segment) - args.last_plug),
args.is_shortened,
&args);
}
// 如果有下一个segment则处理下一个
if (heap_segment_next_rw (current_heap_segment))
{
current_heap_segment = heap_segment_next_rw (current_heap_segment);
current_brick = brick_of (heap_segment_mem (current_heap_segment));
end_brick = brick_of (heap_segment_allocated (current_heap_segment)-1);
args.last_plug = 0;
// 更新src_gennum (如果segment是ephemeral_heap_segment则需要进一步判断)
if (args.check_gennum_p)
{
args.src_gennum = ((current_heap_segment == ephemeral_heap_segment) ? -1 : 2);
}
continue;
}
// 设置最后一个brick的偏移值, 给compact_plug善后
else
{
if (args.before_last_plug !=0)
{
dprintf (3, ("Fixing last brick %Ix to point to plug %Ix",
args.current_compacted_brick, (size_t)args.before_last_plug));
assert (args.current_compacted_brick != ~1u);
set_brick (args.current_compacted_brick,
args.before_last_plug - brick_address (args.current_compacted_brick));
}
break;
}
}
{
// 如果当前brick有对应的plug树,处理当前brick
int brick_entry = brick_table [ current_brick ];
dprintf (3, ("B: %Ix(%Ix)->%Ix",
current_brick, (size_t)brick_entry, (brick_address (current_brick) + brick_entry - 1)));
if (brick_entry >= 0)
{
compact_in_brick ((brick_address (current_brick) + brick_entry -1),
&args);
}
}
current_brick++;
}
}
// 复制已完毕
// 恢复备份的数据到被覆盖的部分
recover_saved_pinned_info();
// 统计压缩阶段的结束时间
#ifdef TIME_GC
finish = GetCycleCount32();
compact_time = finish - start;
#endif //TIME_GC
concurrent_print_time_delta ("compact end");
dprintf(2,("---- End of Compact phase ----"));
}
gc_heap::compact_in_brick函数的代码如下:
这个函数和上面的relocate_survivors_in_brick函数很像
void gc_heap::compact_in_brick (uint8_t* tree, compact_args* args)
{
assert (tree != NULL);
int left_node = node_left_child (tree);
int right_node = node_right_child (tree);
// 需要移动的偏移值,前面计划阶段模拟压缩时设置的reloc
ptrdiff_t relocation = node_relocation_distance (tree);
args->print();
// 处理左节点
if (left_node)
{
dprintf (3, ("B: L: %d->%Ix", left_node, (tree + left_node)));
compact_in_brick ((tree + left_node), args);
}
uint8_t* plug = tree;
BOOL has_pre_plug_info_p = FALSE;
BOOL has_post_plug_info_p = FALSE;
// 如果这个plug是pinned plug
// 获取是否有has_pre_plug_info_p (是否覆盖了last_plug的尾部)
// 获取是否有has_post_plug_info_p (是否被下一个plug覆盖了尾部)
if (tree == oldest_pinned_plug)
{
args->pinned_plug_entry = get_oldest_pinned_entry (&has_pre_plug_info_p,
&has_post_plug_info_p);
assert (tree == pinned_plug (args->pinned_plug_entry));
}
// 处理last_plug
if (args->last_plug != 0)
{
size_t gap_size = node_gap_size (tree);
// last_plug的结尾 = 当前plug的开始地址 - gap
uint8_t* gap = (plug - gap_size);
uint8_t* last_plug_end = gap;
// last_plug的大小 = last_plug的结尾 - last_plug的开始
size_t last_plug_size = (last_plug_end - args->last_plug);
dprintf (3, ("tree: %Ix, last_plug: %Ix, gap: %Ix(%Ix), last_plug_end: %Ix, size: %Ix",
tree, args->last_plug, gap, gap_size, last_plug_end, last_plug_size));
// last_plug的尾部是否被覆盖了
// args->is_shortened代表last_plug是pinned_plug,被下一个unpinned plug覆盖了尾部
// has_pre_plug_info_p代表last_plug是unpinned plug,被下一个pinned plug覆盖了尾部
BOOL check_last_object_p = (args->is_shortened || has_pre_plug_info_p);
if (!check_last_object_p)
{
assert (last_plug_size >= Align (min_obj_size));
}
// 处理last_plug
compact_plug (args->last_plug, last_plug_size, check_last_object_p, args);
}
else
{
// 第一个plug不可能覆盖前面的plug的结尾
assert (!has_pre_plug_info_p);
}
dprintf (3, ("set args last plug to plug: %Ix, reloc: %Ix", plug, relocation));
// 设置last_plug
args->last_plug = plug;
// 设置last_plugd移动偏移值
args->last_plug_relocation = relocation;
// 设置是否被覆盖了尾部
args->is_shortened = has_post_plug_info_p;
// 处理右节点
if (right_node)
{
dprintf (3, ("B: R: %d->%Ix", right_node, (tree + right_node)));
compact_in_brick ((tree + right_node), args);
}
}
gc_heap::compact_plug函数的代码如下:
void gc_heap::compact_plug (uint8_t* plug, size_t size, BOOL check_last_object_p, compact_args* args)
{
args->print();
// 复制到的地址,plug + reloc
uint8_t* reloc_plug = plug + args->last_plug_relocation;
// 如果plug的结尾被覆盖过
if (check_last_object_p)
{
// 添加特殊gap的大小
size += sizeof (gap_reloc_pair);
mark* entry = args->pinned_plug_entry;
// 在复制内存前把被覆盖的内容和原始内容交换一下
// 复制内存后需要交换回去
if (args->is_shortened)
{
// 当前plug是pinned plug,被下一个unpinned plug覆盖
assert (entry->has_post_plug_info());
entry->swap_post_plug_and_saved();
}
else
{
// 当前plug是unpinned plug,被下一个pinned plug覆盖
assert (entry->has_pre_plug_info());
entry->swap_pre_plug_and_saved();
}
}
// 复制之前的brick中的偏移值
int old_brick_entry = brick_table [brick_of (plug)];
assert (node_relocation_distance (plug) == args->last_plug_relocation);
// 处理对齐和pad
#ifdef FEATURE_STRUCTALIGN
ptrdiff_t alignpad = node_alignpad(plug);
if (alignpad)
{
make_unused_array (reloc_plug - alignpad, alignpad);
if (brick_of (reloc_plug - alignpad) != brick_of (reloc_plug))
{
// The alignment padding is straddling one or more bricks;
// it has to be the last "object" of its first brick.
fix_brick_to_highest (reloc_plug - alignpad, reloc_plug);
}
}
#else // FEATURE_STRUCTALIGN
size_t unused_arr_size = 0;
BOOL already_padded_p = FALSE;
#ifdef SHORT_PLUGS
if (is_plug_padded (plug))
{
already_padded_p = TRUE;
clear_plug_padded (plug);
unused_arr_size = Align (min_obj_size);
}
#endif //SHORT_PLUGS
if (node_realigned (plug))
{
unused_arr_size += switch_alignment_size (already_padded_p);
}
if (unused_arr_size != 0)
{
make_unused_array (reloc_plug - unused_arr_size, unused_arr_size);
if (brick_of (reloc_plug - unused_arr_size) != brick_of (reloc_plug))
{
dprintf (3, ("fix B for padding: %Id: %Ix->%Ix",
unused_arr_size, (reloc_plug - unused_arr_size), reloc_plug));
// The alignment padding is straddling one or more bricks;
// it has to be the last "object" of its first brick.
fix_brick_to_highest (reloc_plug - unused_arr_size, reloc_plug);
}
}
#endif // FEATURE_STRUCTALIGN
#ifdef SHORT_PLUGS
if (is_plug_padded (plug))
{
make_unused_array (reloc_plug - Align (min_obj_size), Align (min_obj_size));
if (brick_of (reloc_plug - Align (min_obj_size)) != brick_of (reloc_plug))
{
// The alignment padding is straddling one or more bricks;
// it has to be the last "object" of its first brick.
fix_brick_to_highest (reloc_plug - Align (min_obj_size), reloc_plug);
}
}
#endif //SHORT_PLUGS
// 复制plug中的所有内容和对应的Card Table中的范围(如果copy_cards_p成立)
gcmemcopy (reloc_plug, plug, size, args->copy_cards_p);
// 重新统计generation_allocation_size
if (args->check_gennum_p)
{
int src_gennum = args->src_gennum;
if (src_gennum == -1)
{
src_gennum = object_gennum (plug);
}
int dest_gennum = object_gennum_plan (reloc_plug);
if (src_gennum < dest_gennum)
{
generation_allocation_size (generation_of (dest_gennum)) += size;
}
}
// 更新brick table
// brick table中会保存brick的最后一个plug的偏移值,跨越多个brick的时候后面的brick会是-1
size_t current_reloc_brick = args->current_compacted_brick;
// 如果已经到了下一个brick
// 设置上一个brick的值 = 上一个brick中最后的plug的偏移值, 或者-1
if (brick_of (reloc_plug) != current_reloc_brick)
{
dprintf (3, ("last reloc B: %Ix, current reloc B: %Ix",
current_reloc_brick, brick_of (reloc_plug)));
if (args->before_last_plug)
{
dprintf (3,(" fixing last brick %Ix to point to last plug %Ix(%Ix)",
current_reloc_brick,
args->before_last_plug,
(args->before_last_plug - brick_address (current_reloc_brick))));
{
set_brick (current_reloc_brick,
args->before_last_plug - brick_address (current_reloc_brick));
}
}
current_reloc_brick = brick_of (reloc_plug);
}
// 如果跨越了多个brick
size_t end_brick = brick_of (reloc_plug + size-1);
if (end_brick != current_reloc_brick)
{
// The plug is straddling one or more bricks
// It has to be the last plug of its first brick
dprintf (3,("plug spanning multiple bricks, fixing first brick %Ix to %Ix(%Ix)",
current_reloc_brick, (size_t)reloc_plug,
(reloc_plug - brick_address (current_reloc_brick))));
// 设置第一个brick中的偏移值
{
set_brick (current_reloc_brick,
reloc_plug - brick_address (current_reloc_brick));
}
// 把后面的brick设为-1,除了end_brick
// update all intervening brick
size_t brick = current_reloc_brick + 1;
dprintf (3,("setting intervening bricks %Ix->%Ix to -1",
brick, (end_brick - 1)));
while (brick < end_brick)
{
set_brick (brick, -1);
brick++;
}
// 如果end_brick中无其他plug,end_brick也会被设为-1
// brick_address (end_brick) - 1 - brick_address (end_brick) = -1
// code last brick offset as a plug address
args->before_last_plug = brick_address (end_brick) -1;
current_reloc_brick = end_brick;
dprintf (3, ("setting before last to %Ix, last brick to %Ix",
args->before_last_plug, current_reloc_brick));
}
// 如果只在一个brick中
else
{
// 记录当前brick中的最后一个plug
dprintf (3, ("still in the same brick: %Ix", end_brick));
args->before_last_plug = reloc_plug;
}
// 更新最后设置的brick
args->current_compacted_brick = current_reloc_brick;
// 复制完毕以后把被覆盖的内容和原始内容交换回去
// 注意如果plug移动的距离比覆盖的大小要少,这里会把复制后的内容给破坏掉
// 后面还需要使用recover_saved_pinned_info还原
if (check_last_object_p)
{
mark* entry = args->pinned_plug_entry;
if (args->is_shortened)
{
entry->swap_post_plug_and_saved();
}
else
{
entry->swap_pre_plug_and_saved();
}
}
}
gc_heap::gcmemcopy函数的代码如下:
// POPO TODO: We should actually just recover the artifically made gaps here..because when we copy
// we always copy the earlier plugs first which means we won't need the gap sizes anymore. This way
// we won't need to individually recover each overwritten part of plugs.
inline
void gc_heap::gcmemcopy (uint8_t* dest, uint8_t* src, size_t len, BOOL copy_cards_p)
{
// 如果地址一样可以跳过
if (dest != src)
{
#ifdef BACKGROUND_GC
if (current_c_gc_state == c_gc_state_marking)
{
//TODO: should look to see whether we should consider changing this
// to copy a consecutive region of the mark array instead.
copy_mark_bits_for_addresses (dest, src, len);
}
#endif //BACKGROUND_GC
// 复制plug中的所有对象到新的地址上
// memcopy做的东西和memcpy一样,微软自己写的一个函数而已
//dprintf(3,(" Memcopy [%Ix->%Ix, %Ix->%Ix[", (size_t)src, (size_t)dest, (size_t)src+len, (size_t)dest+len));
dprintf(3,(" mc: [%Ix->%Ix, %Ix->%Ix[", (size_t)src, (size_t)dest, (size_t)src+len, (size_t)dest+len));
memcopy (dest - plug_skew, src - plug_skew, (int)len);
#ifdef FEATURE_USE_SOFTWARE_WRITE_WATCH_FOR_GC_HEAP
if (SoftwareWriteWatch::IsEnabledForGCHeap())
{
// The ranges [src - plug_kew .. src[ and [src + len - plug_skew .. src + len[ are ObjHeaders, which don't have GC
// references, and are not relevant for write watch. The latter range actually corresponds to the ObjHeader for the
// object at (src + len), so it can be ignored anyway.
SoftwareWriteWatch::SetDirtyRegion(dest, len - plug_skew);
}
#endif // FEATURE_USE_SOFTWARE_WRITE_WATCH_FOR_GC_HEAP
// 复制对应的Card Table范围
// copy_cards_p成立的时候复制src ~ src+len到dest
// copy_cards_p不成立的时候清除dest ~ dest+len
copy_cards_range (dest, src, len, copy_cards_p);
}
}
gc_heap::compact_loh函数的代码如下:
void gc_heap::compact_loh()
{
assert (should_compact_loh());
generation* gen = large_object_generation;
heap_segment* start_seg = heap_segment_rw (generation_start_segment (gen));
PREFIX_ASSUME(start_seg != NULL);
heap_segment* seg = start_seg;
heap_segment* prev_seg = 0;
uint8_t* o = generation_allocation_start (gen);
//Skip the generation gap object
o = o + AlignQword (size (o));
// We don't need to ever realloc gen3 start so don't touch it.
uint8_t* free_space_start = o;
uint8_t* free_space_end = o;
generation_allocator (gen)->clear();
generation_free_list_space (gen) = 0;
generation_free_obj_space (gen) = 0;
loh_pinned_queue_bos = 0;
// 枚举大对象的堆
while (1)
{
// 当前segment处理完毕,处理下一个
if (o >= heap_segment_allocated (seg))
{
heap_segment* next_seg = heap_segment_next (seg);
// 如果当前segment为空,表示可以删掉这个segment
// 修改segment链表,把空的segment放到后面
if ((heap_segment_plan_allocated (seg) == heap_segment_mem (seg)) &&
(seg != start_seg) && !heap_segment_read_only_p (seg))
{
dprintf (3, ("Preparing empty large segment %Ix", (size_t)seg));
assert (prev_seg);
heap_segment_next (prev_seg) = next_seg;
heap_segment_next (seg) = freeable_large_heap_segment;
freeable_large_heap_segment = seg;
}
else
{
// 更新heap_segment_allocated
// 释放(decommit)未使用的内存空间
if (!heap_segment_read_only_p (seg))
{
// We grew the segment to accommondate allocations.
if (heap_segment_plan_allocated (seg) > heap_segment_allocated (seg))
{
if ((heap_segment_plan_allocated (seg) - plug_skew) > heap_segment_used (seg))
{
heap_segment_used (seg) = heap_segment_plan_allocated (seg) - plug_skew;
}
}
heap_segment_allocated (seg) = heap_segment_plan_allocated (seg);
dprintf (3, ("Trimming seg to %Ix[", heap_segment_allocated (seg)));
decommit_heap_segment_pages (seg, 0);
dprintf (1236, ("CLOH: seg: %Ix, alloc: %Ix, used: %Ix, committed: %Ix",
seg,
heap_segment_allocated (seg),
heap_segment_used (seg),
heap_segment_committed (seg)));
//heap_segment_used (seg) = heap_segment_allocated (seg) - plug_skew;
dprintf (1236, ("CLOH: used is set to %Ix", heap_segment_used (seg)));
}
prev_seg = seg;
}
// 处理下一个segment,不存在时跳出
seg = next_seg;
if (seg == 0)
break;
else
{
o = heap_segment_mem (seg);
}
}
// 如果对象已标记
if (marked (o))
{
free_space_end = o;
size_t size = AlignQword (size (o));
size_t loh_pad;
uint8_t* reloc = o;
// 清除标记
clear_marked (o);
// 如果对象是固定的
if (pinned (o))
{
// We are relying on the fact the pinned objects are always looked at in the same order
// in plan phase and in compact phase.
mark* m = loh_pinned_plug_of (loh_deque_pinned_plug());
uint8_t* plug = pinned_plug (m);
assert (plug == o);
loh_pad = pinned_len (m);
// 清除固定标记
clear_pinned (o);
}
else
{
loh_pad = AlignQword (loh_padding_obj_size);
// 复制对象内存
reloc += loh_node_relocation_distance (o);
gcmemcopy (reloc, o, size, TRUE);
}
// 添加loh_pad到free list
thread_gap ((reloc - loh_pad), loh_pad, gen);
// 处理下一个对象
o = o + size;
free_space_start = o;
if (o < heap_segment_allocated (seg))
{
assert (!marked (o));
}
}
else
{
// 跳过未标记对象
while (o < heap_segment_allocated (seg) && !marked (o))
{
o = o + AlignQword (size (o));
}
}
}
assert (loh_pinned_plug_que_empty_p());
dprintf (1235, ("after GC LOH size: %Id, free list: %Id, free obj: %Id\n\n",
generation_size (max_generation + 1),
generation_free_list_space (gen),
generation_free_obj_space (gen)));
}
gc_heap::recover_saved_pinned_info函数的代码如下:
void gc_heap::recover_saved_pinned_info()
{
// 重设mark_stack_array队列
reset_pinned_queue_bos();
// 恢复各个pinned plug被覆盖或者覆盖的数据
while (!(pinned_plug_que_empty_p()))
{
mark* oldest_entry = oldest_pin();
oldest_entry->recover_plug_info();
#ifdef GC_CONFIG_DRIVEN
if (oldest_entry->has_pre_plug_info() && oldest_entry->has_post_plug_info())
record_interesting_data_point (idp_pre_and_post_pin);
else if (oldest_entry->has_pre_plug_info())
record_interesting_data_point (idp_pre_pin);
else if (oldest_entry->has_post_plug_info())
record_interesting_data_point (idp_post_pin);
#endif //GC_CONFIG_DRIVEN
deque_pinned_plug();
}
}
mark::recover_plug_info函数的代码如下:
函数前面的注释讲的是之前复制plug的时候已经包含了被覆盖的内容(swap_pre_plug_and_saved),
但是如果移动的位置小于3个指针的大小(注释中的< 3应该是>= 3)则复制完以后有可能再次被swap_pre_plug_and_saved破坏掉。
// We should think about whether it's really necessary to have to copy back the pre plug
// info since it was already copied during compacting plugs. But if a plug doesn't move
// by < 3 ptr size, it means we'd have to recover pre plug info.
void recover_plug_info()
{
// 如果这个pinned plug覆盖了前一个unpinned plug的结尾,把备份的数据恢复回去
if (saved_pre_p)
{
// 如果已经压缩过,需要复制到重定位后的saved_pre_plug_info_reloc_start
// 并且使用saved_pre_plug_reloc备份(这个备份里面的成员也经过了重定位)
if (gc_heap::settings.compaction)
{
dprintf (3, ("%Ix: REC Pre: %Ix-%Ix",
first,
&saved_pre_plug_reloc,
saved_pre_plug_info_reloc_start));
memcpy (saved_pre_plug_info_reloc_start, &saved_pre_plug_reloc, sizeof (saved_pre_plug_reloc));
}
// 如果未压缩过,可以复制到这个pinned plug的前面
// 并且使用saved_pre_plug备份
else
{
dprintf (3, ("%Ix: REC Pre: %Ix-%Ix",
first,
&saved_pre_plug,
(first - sizeof (plug_and_gap))));
memcpy ((first - sizeof (plug_and_gap)), &saved_pre_plug, sizeof (saved_pre_plug));
}
}
// 如果这个pinned plug被下一个unpinned plug覆盖了结尾,把备份的数据恢复回去
if (saved_post_p)
{
// 因为pinned plug不会移动
// 这里的saved_post_plug_info_start不会改变
// 使用saved_post_plug_reloc备份(这个备份里面的成员也经过了重定位)
if (gc_heap::settings.compaction)
{
dprintf (3, ("%Ix: REC Post: %Ix-%Ix",
first,
&saved_post_plug_reloc,
saved_post_plug_info_start));
memcpy (saved_post_plug_info_start, &saved_post_plug_reloc, sizeof (saved_post_plug_reloc));
}
// 使用saved_pre_plug备份
else
{
dprintf (3, ("%Ix: REC Post: %Ix-%Ix",
first,
&saved_post_plug,
saved_post_plug_info_start));
memcpy (saved_post_plug_info_start, &saved_post_plug, sizeof (saved_post_plug));
}
}
}
压缩阶段结束以后还需要做一些收尾工作,请从上面plan_phase中的fix_generation_bounds (condemned_gen_number, consing_gen);继续看。
如果计划阶段不选择压缩,就会进入清扫阶段:
清扫阶段(sweep_phase)
清扫阶段负责把plug与plug之间的空间变为free object然后加到对应代的free list中,并且负责修改代边界。
加到free list中的区域会在后面供分配新的上下文使用。
清扫阶段的主要工作在函数make_free_lists中完成,名称叫sweep_phase的函数目前不存在。
扫描plug时会使用计划阶段构建好的plug信息和brick table,但模拟压缩的偏移值reloc和计划代边界plan_allocation_start不会被使用。
清扫阶段的代码
gc_heap::make_free_lists函数的代码如下:
void gc_heap::make_free_lists (int condemned_gen_number)
{
// 统计清扫阶段的开始时间
#ifdef TIME_GC
unsigned start;
unsigned finish;
start = GetCycleCount32();
#endif //TIME_GC
//Promotion has to happen in sweep case.
assert (settings.promotion);
// 从收集代的第一个segment开始处理
generation* condemned_gen = generation_of (condemned_gen_number);
uint8_t* start_address = generation_allocation_start (condemned_gen);
size_t current_brick = brick_of (start_address);
heap_segment* current_heap_segment = heap_segment_rw (generation_start_segment (condemned_gen));
PREFIX_ASSUME(current_heap_segment != NULL);
uint8_t* end_address = heap_segment_allocated (current_heap_segment);
size_t end_brick = brick_of (end_address-1);
// 清扫阶段使用的参数
make_free_args args;
// 当前生成的free object应该归到的代序号
// 更新代边界的时候也会使用
args.free_list_gen_number = min (max_generation, 1 + condemned_gen_number);
// 超过这个值就需要更新free_list_gen_number和free_list_gen
// 在清扫阶段settings.promotion == true时
// generation_limit遇到gen 0或者gen 1的时候返回heap_segment_reserved (ephemeral_heap_segment),则原代0的对象归到代1
// generation_limit遇到gen 2的时候返回generation_allocation_start (generation_of ((gen_number - 2))),则原代1的对象归到代2
// MAX_PTR只是用来检测第一次使用的,后面会更新
args.current_gen_limit = (((condemned_gen_number == max_generation)) ?
MAX_PTR :
(generation_limit (args.free_list_gen_number)));
// 当前生成的free object应该归到的代
args.free_list_gen = generation_of (args.free_list_gen_number);
// 当前brick中地址最大的plug,用于更新brick表
args.highest_plug = 0;
// 开始遍历brick
if ((start_address < end_address) ||
(condemned_gen_number == max_generation))
{
while (1)
{
// 当前segment处理完毕
if ((current_brick > end_brick))
{
// 如果第一个segment无存活的对象,则重设它的heap_segment_allocated
// 并且设置generation_allocation_start (gen)等于这个空segment的开始地址
if (args.current_gen_limit == MAX_PTR)
{
//We had an empty segment
//need to allocate the generation start
generation* gen = generation_of (max_generation);
heap_segment* start_seg = heap_segment_rw (generation_start_segment (gen));
PREFIX_ASSUME(start_seg != NULL);
uint8_t* gap = heap_segment_mem (start_seg);
generation_allocation_start (gen) = gap;
heap_segment_allocated (start_seg) = gap + Align (min_obj_size);
// 确保代最少有一个对象
make_unused_array (gap, Align (min_obj_size));
// 更新代边界
reset_allocation_pointers (gen, gap);
dprintf (3, ("Start segment empty, fixing generation start of %d to: %Ix",
max_generation, (size_t)gap));
// 更新current_gen_limit
args.current_gen_limit = generation_limit (args.free_list_gen_number);
}
// 有下一个segment的时候继续处理下一个segment, 否则跳出
if (heap_segment_next_rw (current_heap_segment))
{
current_heap_segment = heap_segment_next_rw (current_heap_segment);
current_brick = brick_of (heap_segment_mem (current_heap_segment));
end_brick = brick_of (heap_segment_allocated (current_heap_segment)-1);
continue;
}
else
{
break;
}
}
{
// 如果brick中保存了对plug树的偏移值则
// 调用make_free_list_in_brick
// 设置brick到地址最大的plug
// 否则设置设为-1 (把-2, -3等等的都改为-1)
int brick_entry = brick_table [ current_brick ];
if ((brick_entry >= 0))
{
make_free_list_in_brick (brick_address (current_brick) + brick_entry-1, &args);
dprintf(3,("Fixing brick entry %Ix to %Ix",
current_brick, (size_t)args.highest_plug));
set_brick (current_brick,
(args.highest_plug - brick_address (current_brick)));
}
else
{
if ((brick_entry > -32768))
{
#ifdef _DEBUG
ptrdiff_t offset = brick_of (args.highest_plug) - current_brick;
if ((brick_entry != -32767) && (! ((offset == brick_entry))))
{
assert ((brick_entry == -1));
}
#endif //_DEBUG
//init to -1 for faster find_first_object
set_brick (current_brick, -1);
}
}
}
current_brick++;
}
}
{
// 设置剩余的代边界
int bottom_gen = 0;
args.free_list_gen_number--;
while (args.free_list_gen_number >= bottom_gen)
{
uint8_t* gap = 0;
generation* gen2 = generation_of (args.free_list_gen_number);
// 保证代中最少有一个对象
gap = allocate_at_end (Align(min_obj_size));
generation_allocation_start (gen2) = gap;
// 设置代边界
reset_allocation_pointers (gen2, gap);
dprintf(3,("Fixing generation start of %d to: %Ix",
args.free_list_gen_number, (size_t)gap));
PREFIX_ASSUME(gap != NULL);
// 代中第一个对象应该是free object
make_unused_array (gap, Align (min_obj_size));
args.free_list_gen_number--;
}
// 更新alloc_allocated成员到gen 0的开始边界
//reset the allocated size
uint8_t* start2 = generation_allocation_start (youngest_generation);
alloc_allocated = start2 + Align (size (start2));
}
// 统计清扫阶段的结束时间
#ifdef TIME_GC
finish = GetCycleCount32();
sweep_time = finish - start;
#endif //TIME_GC
}
gc_heap::make_free_list_in_brick函数的代码如下:
void gc_heap::make_free_list_in_brick (uint8_t* tree, make_free_args* args)
{
assert ((tree != NULL));
{
int right_node = node_right_child (tree);
int left_node = node_left_child (tree);
args->highest_plug = 0;
if (! (0 == tree))
{
// 处理左边的节点
if (! (0 == left_node))
{
make_free_list_in_brick (tree + left_node, args);
}
// 处理当前节点
{
uint8_t* plug = tree;
// 当前plug前面的空余空间
size_t gap_size = node_gap_size (tree);
// 空余空间的开始
uint8_t* gap = (plug - gap_size);
dprintf (3,("Making free list %Ix len %d in %d",
//dprintf (3,("F: %Ix len %Ix in %d",
(size_t)gap, gap_size, args->free_list_gen_number));
// 记录当前brick中地址最大的plug
args->highest_plug = tree;
#ifdef SHORT_PLUGS
if (is_plug_padded (plug))
{
dprintf (3, ("%Ix padded", plug));
clear_plug_padded (plug);
}
#endif //SHORT_PLUGS
gen_crossing:
{
// 如果current_gen_limit等于MAX_PTR,表示我们需要先决定gen 2的边界
// 如果plug >= args->current_gen_limit并且plug在ephemeral heap segment,表示我们需要决定gen 1或gen 0的边界
// 决定的流程如下
// - 第一次current_gen_limit == MAX_PTR,在处理所有对象之前决定gen 2的边界
// - 第二次plug超过了generation_allocation_start (generation_of ((gen_number - 2)))并且在ephemeral heap segment中,决定gen 1的边界
// - 因为plug不会超过heap_segment_reserved (ephemeral_heap_segment),第三次会在上面的"设置剩余的代边界"中决定gen 0的边界
if ((args->current_gen_limit == MAX_PTR) ||
((plug >= args->current_gen_limit) &&
ephemeral_pointer_p (plug)))
{
dprintf(3,(" Crossing Generation boundary at %Ix",
(size_t)args->current_gen_limit));
// 在处理所有对象之前决定gen 2的边界时,不需要减1
if (!(args->current_gen_limit == MAX_PTR))
{
args->free_list_gen_number--;
args->free_list_gen = generation_of (args->free_list_gen_number);
}
dprintf(3,( " Fixing generation start of %d to: %Ix",
args->free_list_gen_number, (size_t)gap));
// 决定代边界
reset_allocation_pointers (args->free_list_gen, gap);
// 更新current_gen_limit用于决定下一个代的边界
args->current_gen_limit = generation_limit (args->free_list_gen_number);
// 保证代中最少有一个对象
// 如果这个gap比较大(大于最小对象大小 * 2),剩余的空间还可以在下面放到free list中
if ((gap_size >= (2*Align (min_obj_size))))
{
dprintf(3,(" Splitting the gap in two %Id left",
gap_size));
make_unused_array (gap, Align(min_obj_size));
gap_size = (gap_size - Align(min_obj_size));
gap = (gap + Align(min_obj_size));
}
else
{
make_unused_array (gap, gap_size);
gap_size = 0;
}
goto gen_crossing;
}
}
// 加到free list中
thread_gap (gap, gap_size, args->free_list_gen);
add_gen_free (args->free_list_gen->gen_num, gap_size);
}
// 处理右边的节点
if (! (0 == right_node))
{
make_free_list_in_brick (tree + right_node, args);
}
}
}
}
压缩阶段结束以后还需要做一些收尾工作,请从上面plan_phase中的recover_saved_pinned_info();继续看。
如果您发现该资源为电子书等存在侵权的资源或对该资源描述不正确等,可点击“私信”按钮向作者进行反馈;如作者无回复可进行平台仲裁,我们会在第一时间进行处理!
- 最近热门资源
- 银河麒麟桌面操作系统备份用户数据 131
- 统信桌面专业版【全盘安装UOS系统】介绍 129
- 银河麒麟桌面操作系统安装佳能打印机驱动方法 121
- 银河麒麟桌面操作系统 V10-SP1用户密码修改 109
- 麒麟系统连接打印机常见问题及解决方法 30
- 最近下载排行榜
- 银河麒麟桌面操作系统备份用户数据 0
- 统信桌面专业版【全盘安装UOS系统】介绍 0
- 银河麒麟桌面操作系统安装佳能打印机驱动方法 0
- 银河麒麟桌面操作系统 V10-SP1用户密码修改 0
- 麒麟系统连接打印机常见问题及解决方法 0

prtyaa 收益393.62元

zlj141319 收益218元

1843880570 收益214.2元

IT-feng 收益210.13元

风晓 收益208.24元

777 收益172.71元

Fhawking 收益106.6元

信创来了 收益105.84元

克里斯蒂亚诺诺 收益91.08元

技术-小陈 收益79.5元
