海思机器人平台携手伙伴,亮相openEuler Summit 2023峰会

2023年12月15日至16日,openEuler
Summit 2023峰会在北京召开,这是一场致力于推动操作系统产业发展的盛大峰会,聚焦推动操作系统技术不断创新,共建全球开源新生态。在本次大会上,海思携手多家合作伙伴,带来基于openEuler的机器人开发平台以及多样化解决方案。
基于openEuler的多传感器融合机器人开发平台
在这次峰会上,海思带来了基于openEuler的多传感器融合机器人开发平台,该方案在业界首次实现了将dToF、视觉在内的多传感器拼接与融合,同时结合海思领先的分布式异构计算、全场景联接、精准执行/表达/交互等技术,成为强大的机器人开发平台。峰会现场除了海思机器人开发平台和原型样机,还展示了合作伙伴基于海思平台开发的相关生态产品,包括微型固态激光雷达、多向固态激光雷达、短距星闪Wi-Fi通信模组、广域通信模组等,以及面向机器人、工业视觉、智能家居等场景的首款“欧拉派”开发板。

海思机器人开发平台具备强劲的智能化处理能力,包括高达10.4TOPS INT8的NPU、4xA55、高性能RISC-V CPU以及双核DSP等,可接入高达7路的dToF微型激光雷达传感器,以及4路摄像头输入,并具备4K60的高性能视频编解码能力,是一个以AI, CPU和媒体处理为核心,并提供丰富的接口可接入强大的边缘智能处理平台。
在强大的端侧算力加持下,海思机器人开发平台首次实现了基于dToF全向3D立体感知拼接避障方案,通过MIPI或USB接口将2-8路dToF固态激光雷达Sensor采集到的深度信息,通过SoC的强大算力实现校准算法、搜峰深度计算算法、温度补偿算法、 滤波算法、点云转换等算法计算,并进行点云动态拼接。再结合openEuler的异构计算能力,通过DSP进行点云动态去除地面等算法加速,可以快速识别目标障碍物,然后通过ROS2系统进行路径优化,实时避障等操作。
基于openEuler的Yocto构建环境,可以快速构建基于海思机器人解决方案的开发环境,实现内核、文件系统以及SD卡升级镜像的一次性构建,通过工具优化,实现2分钟内就可以对整系统进行升级,同时基于openEuler Embedded社区版本对接业界主流的机器人开源ROS系统,平滑使用ROS多个开源组件和工具平台,实现机器人开发平台的快速构建。

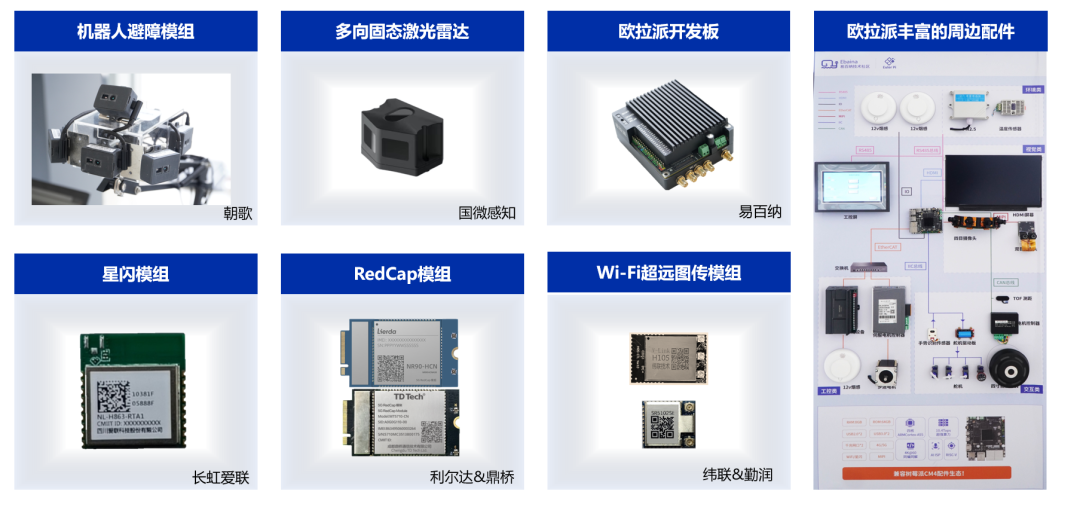
机器人是一个复杂的系统,海思秉承“众行远”的理念,与多家伙伴深入合作,围绕机器人开发平台推出了多品类的生态产品与配件:欧拉派首款开发板(易百纳)、机器人避障模组(朝歌)、多向固态激光雷达模组(国微感知)、Wi-Fi超远图传模组(纬联&勤润)、星闪模组(爱联)、RedCap模组(鼎桥&利尔达)。这一系列配套产品不仅满足多传感器融合机器人各个环节的需求,同时通过深度整合,使其相互协同工作,构建更加智能、高效的机器人体系。在峰会现场可以看到鼎桥等合作伙伴基于海思机器人平台开发的面向电力巡检场景的机器人小车。

网站声明:如果转载,请联系本站管理员。否则一切后果自行承担。
- 上周热门
- 银河麒麟添加网络打印机时,出现“client-error-not-possible”错误提示 1448
- 银河麒麟打印带有图像的文档时出错 1365
- 银河麒麟添加打印机时,出现“server-error-internal-error” 1151
- 统信桌面专业版【如何查询系统安装时间】 1073
- 统信操作系统各版本介绍 1070
- 统信桌面专业版【全盘安装UOS系统】介绍 1028
- 麒麟系统也能完整体验微信啦! 984
- 统信【启动盘制作工具】使用介绍 627
- 统信桌面专业版【一个U盘做多个系统启动盘】的方法 575
- 信刻全自动档案蓝光光盘检测一体机 484
- 本周热议
- 我的信创开放社区兼职赚钱历程 40
- 今天你签到了吗? 27
- 信创开放社区邀请他人注册的具体步骤如下 15
- 如何玩转信创开放社区—从小白进阶到专家 15
- 方德桌面操作系统 14
- 我有15积分有什么用? 13
- 用抖音玩法闯信创开放社区——用平台宣传企业产品服务 13
- 如何让你先人一步获得悬赏问题信息?(创作者必看) 12
- 2024中国信创产业发展大会暨中国信息科技创新与应用博览会 9
- 中央国家机关政府采购中心:应当将CPU、操作系统符合安全可靠测评要求纳入采购需求 8
